🦾 1. 액추에이터 (Actuator)
📘 정의
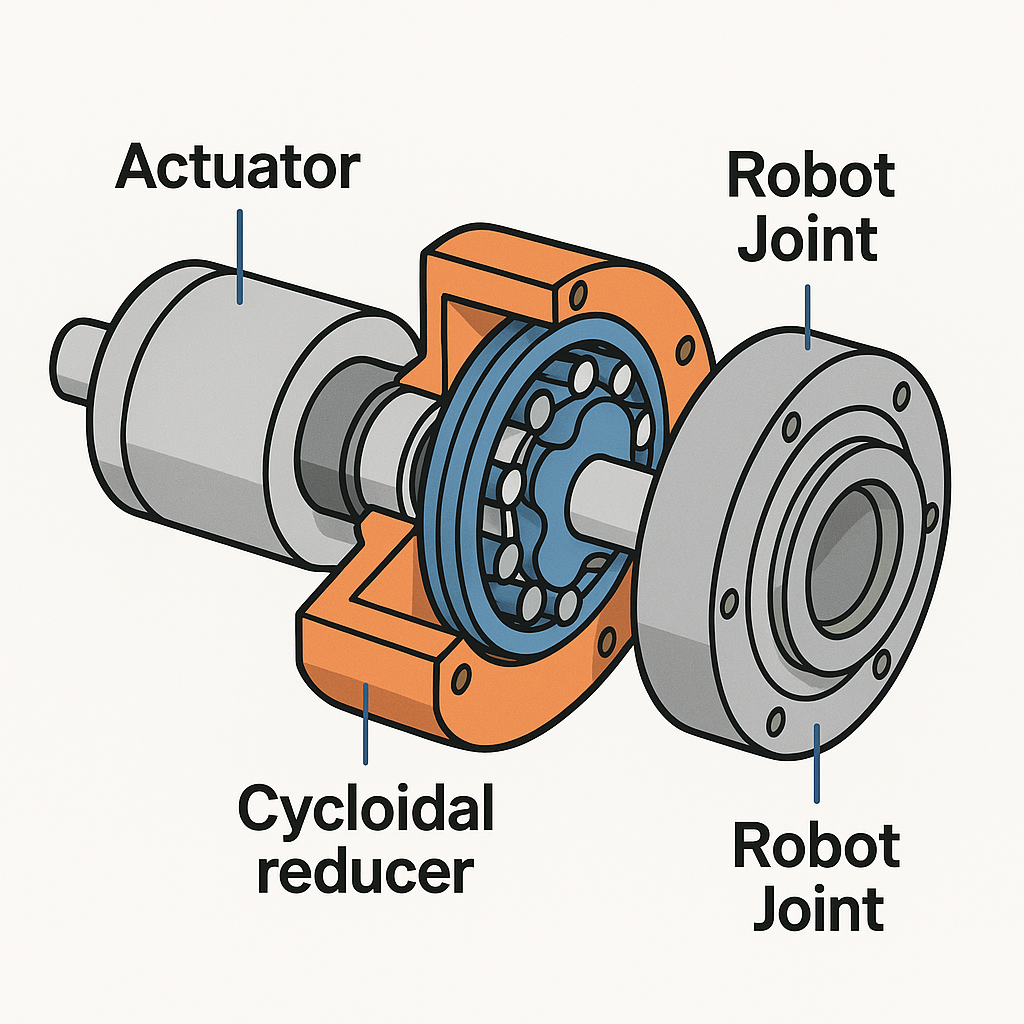
액추에이터는 로봇에서 전기·공기·유압 등의 에너지를 기계적 운동(회전이나 직선운동) 으로 바꾸는 장치입니다. 쉽게 말하면 “로봇의 근육” 역할을 하는 장치입니다.
⚙️ 주요 종류
| 종류 | 구동원리 | 특징 | 예시 |
|---|
| 전기식 액추에이터 | 전기 모터(DC, BLDC, 스텝모터 등) | 제어가 쉽고 소형화 가능 | 산업용 로봇 팔, 협동로봇 |
| 공압식 액추에이터 | 압축공기 이용 | 빠른 반응, 부드럽지만 정밀도 낮음 | 픽앤플레이스, 로봇 손가락 |
| 유압식 액추에이터 | 오일 압력 이용 | 강한 힘, 중대형 로봇에 적합 | 건설용 로봇, 휴머노이드 하체 |
| 형상기억합금(SMA), 피에조 등 특수형 | 재료의 물리적 성질 변화 | 미세구동용, 생체모사 로봇 | 마이크로로봇, 의료용 로봇 |
🧩 로봇 내 역할
- 모터 + 감속기 + 센서로 하나의 구동축을 구성
- 로봇 관절의 각속도, 토크, 위치 제어를 수행
- 제어기는 액추에이터에 PWM, 전류, 전압 신호를 보내 원하는 움직임을 구현
⚙️ 2. 사이클로이드 감속기 (Cycloidal Reducer)
📘 정의
사이클로이드 감속기는 모터의 고속회전을 정확하고 강력한 저속 회전으로 바꾸는 기어 감속장치입니다. 일반적인 헬리컬 기어나 유성기어와 달리, 사이클로이드 곡선(cycloidal curve) 을 이용한 롤링 접촉 방식으로 동력을 전달합니다.
🧠 구조 개념
입력축(모터) → 편심 캠 → 사이클로이드 디스크 → 롤러핀 → 출력축
- 편심 캠이 사이클로이드 디스크를 흔들면서 롤러핀과 접촉
- 이 과정에서 입력 회전이 기하학적 비율로 감속되어 출력
- 접촉면이 많아 하중 분산 효과가 크고, 백래시(backlash)가 거의 없음
🔍 특징
| 항목 | 내용 |
|---|
| 고정밀 | 백래시 거의 없음 (정밀 제어에 유리) |
| 고토크 | 접촉면이 넓어 큰 하중 전달 가능 |
| 컴팩트 | 높은 감속비(1:30~1:150)를 소형 구조로 구현 |
| 충격 흡수 | 롤링 접촉이므로 내충격성 우수 |
| 단점 | 제조 정밀도 높고, 내부 마찰·소음이 다소 있음 |
🤖 로봇에서의 활용
- 산업용 6축 로봇이나 협동로봇의 관절 감속기로 사용
- 정밀 위치제어, 고하중 작업에 적합
- 대표 제조사: Nabtesco, Sumitomo, Harmonic Drive(유사 구조) 등
🔩 요약 비교
| 구분 | 액추에이터 | 사이클로이드 감속기 |
|---|
| 기능 | 에너지를 운동으로 변환 | 운동 속도·토크를 변환 |
| 위치 | 로봇의 관절 또는 구동부 | 모터와 출력축 사이 |
| 대표형태 | 모터, 공압실린더 | 사이클로이드/하모닉 감속기 |
| 역할 비유 | 로봇의 근육 | 로봇의 관절 뼈대의 기어관절 |